Rumah
>
Produk > Giro Gentian Optik > Giroskop Gentian Optik > Fiber Optic Gyroscope Fog Accelerometer dan Sistem Navigasi Gnss





Fiber Optic Gyroscope Fog Accelerometer dan Sistem Navigasi Gnss
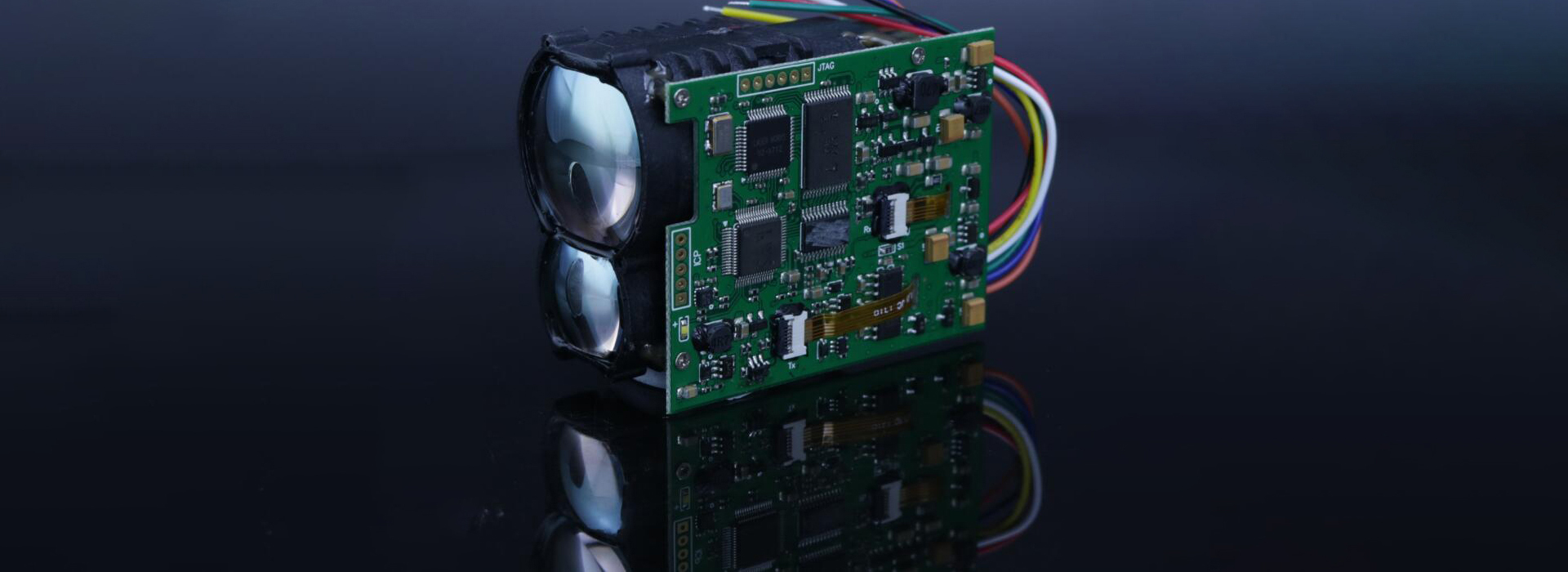
Sistem navigasi bersepadu Giroskop gentian optik JIO-D300S adalah berdasarkan giroskop gentian optik gelung tertutup yang kos efektif, pecutan dan papan penerima GNSS mewah, melalui gabungan pelbagai sensor dan pelaksanaan algoritma penyelesaian navigasi untuk memenuhi keperluan sederhana dan tinggi. -sistem pengukuran mudah alih ketepatan, UAV besar, dsb. Medan aplikasi memerlukan ukuran maklumat sikap, tajuk dan kedudukan yang tepat. Selamat datang untuk membeli Fiber Optic Gyroscope Fog Accelerometer dan Gnss Navigation System daripada kami.
Model:JIO-D300S
Hantar Pertanyaan Muat Turun PDF
Penerangan Produk
Fiber Optic Gyroscope Fog Accelerometer dan Ciri Sistem Navigasi Gnss
Sistem navigasi bersepadu Giroskop gentian optik JIO-D300S adalah berdasarkan giroskop gentian optik gelung tertutup yang kos efektif, pecutan dan papan penerima GNSS mewah, melalui gabungan pelbagai sensor dan pelaksanaan algoritma penyelesaian navigasi untuk memenuhi keperluan sederhana dan tinggi. -sistem pengukuran mudah alih ketepatan, UAV besar, dsb. Medan aplikasi memerlukan ukuran maklumat sikap, tajuk dan kedudukan yang tepat.
Senario aplikasi
Sistem ini mempunyai gabungan mod navigasi inersia/satelit dan mod inersia tulen.
Satelit yang boleh diterima oleh penerima GNSS dalam maklumat kedudukan satelit mod navigasi bersepadu inersia/satelit untuk navigasi gabungan; kedudukan penyelesaian inersia keluaran selepas kehilangan sikap kelajuan isyarat, dengan ketepatan kedudukan peringkat meter dalam masa yang singkat.
Selepas mod inersia tulen dimulakan, ia mempunyai fungsi pengukuran sikap yang tepat dan boleh mengeluarkan padang bergolek dan menuju, inersia tulen boleh secara statik mencari utara.
Pemasangan JIOPTICS giroskop gentian optik untuk memberikan kemudahan fleksibiliti penyepaduan, dan kit alat pembangun kami untuk prototaip pantas, bukan sahaja memenuhi keperluan spesifikasi, juga menyediakan prestasi berkualiti tinggi memenuhi permintaan pengguna akhir.
Satelit yang boleh diterima oleh penerima GNSS dalam maklumat kedudukan satelit mod navigasi bersepadu inersia/satelit untuk navigasi gabungan; kedudukan penyelesaian inersia keluaran selepas kehilangan sikap kelajuan isyarat, dengan ketepatan kedudukan peringkat meter dalam masa yang singkat.
Selepas mod inersia tulen dimulakan, ia mempunyai fungsi pengukuran sikap yang tepat dan boleh mengeluarkan padang bergolek dan menuju, inersia tulen boleh secara statik mencari utara.
Pemasangan JIOPTICS giroskop gentian optik untuk memberikan kemudahan fleksibiliti penyepaduan, dan kit alat pembangun kami untuk prototaip pantas, bukan sahaja memenuhi keperluan spesifikasi, juga menyediakan prestasi berkualiti tinggi memenuhi permintaan pengguna akhir.
Perkhidmatan kami
JIOPTICS ialah pasukan yang profesional dan cekap. Menyediakan perkhidmatan OEM/ODM untuk anda, hubungi kami untuk menyesuaikan giroskop optik gentian eksklusif anda
Ciri-ciri Produk
- Ketepatan kedudukan sehingga paras sentimeter
- Ralat pengukuran sikap lebih baik daripada 0.01°
- Julat suhu operasi: -40~60â
- Persekitaran getaran: 20~2000Hz, 3.03g
- Jenis antara muka yang kaya, menyokong RS232, RS422, CAN dan antara muka standard yang lain
- Masa min antara kegagalan sehingga 30000j
- Ralat pengukuran sikap lebih baik daripada 0.01°
- Julat suhu operasi: -40~60â
- Persekitaran getaran: 20~2000Hz, 3.03g
- Jenis antara muka yang kaya, menyokong RS232, RS422, CAN dan antara muka standard yang lain
- Masa min antara kegagalan sehingga 30000j
Ciri-ciri Elektrik
- Bekalan kuasa: input voltan lebar 12~36V
- Kuasa dinilai: 24W (maks)
- Kuasa dinilai: 24W (maks)
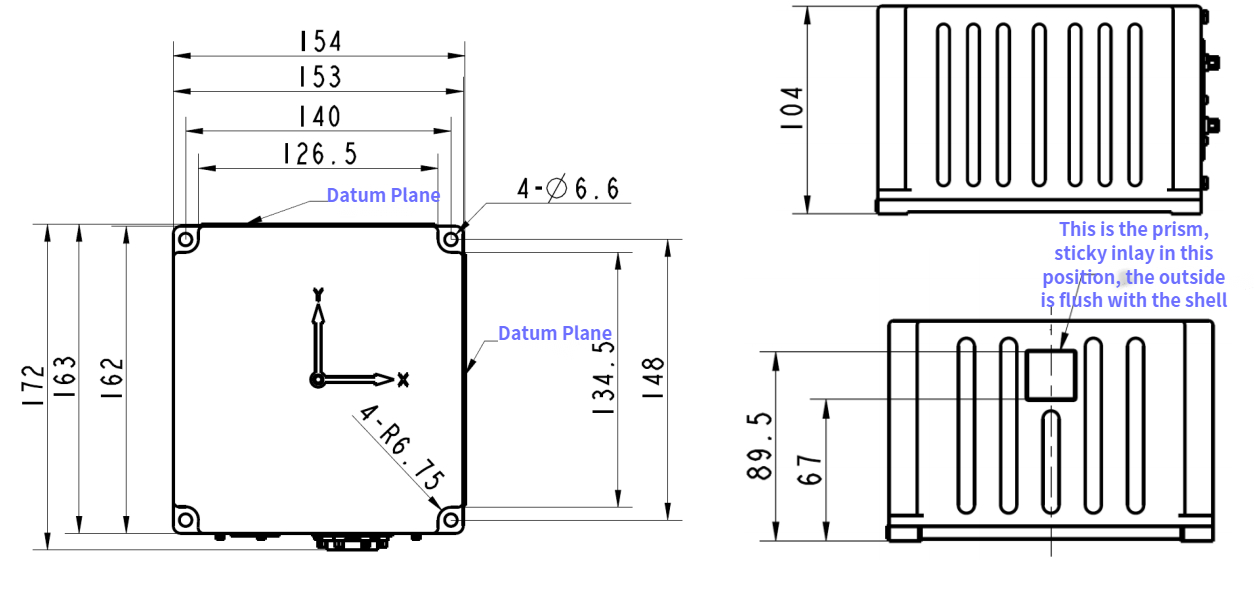
Dimensi Mekanikal
parameter teknikal
| Parameter |
Atribut |
Nilai biasa |
Unit |
| Ketepatan kedudukan |
Titik tunggal (RMS) |
1.2 |
m |
| RTKï¼RMSï¼ |
2cm 1ppm |
|
|
| Pasca pemprosesan (RMS) |
1cm 1ppm |
|
|
| Kehilangan Ketepatan Kunci (CEP) |
2nmâ |
|
|
| Tajuk (RMS) |
Ketepatan gabungan |
0.1â¡ |
º |
| Pasca pemprosesan |
0.01 |
º |
|
| Kehilangan ketepatan pengekalan kunci |
0.02â |
º |
|
| Ketepatan mencari utara |
0.2⢠|
ºSecL |
|
| Sikap (RMS) |
Ketepatan gabungan |
0.01 |
º |
| Pasca pemprosesan |
0.006 |
º |
|
| Kehilangan ketepatan pengekalan kunci |
0.02â |
º |
|
| Ketepatan Halaju Mendatar (RMS) |
|
0.05 |
Cik |
| Ketepatan masa |
|
20 |
NS |
| Kekerapan output data |
|
200⣠|
Hz |
| Gyro |
Julat |
300 |
º/s |
| Kestabilan berat sebelah sifar |
0.02⤠|
º/j |
|
| Faktor skala |
50 |
ppm |
|
| Berjalan rawak sudut |
0.005 |
º/âjam |
|
| Accelerometer |
Julat |
16 |
g |
|
|
Kestabilan berat sebelah sifar |
50⤠|
μg |
| Faktor skala |
50 |
ppm |
|
| Laju jalan rawak |
0.01 |
m/s/âjam |
Laju jalan rawak
| Parameter |
Atribut |
Rujukan |
Unit |
| Saiz fizikal |
Saiz |
176.8×188.8×117 |
mm3 |
| Berat badan |
|
kg |
|
| Ciri-ciri Elektrik |
Voltan terkadar |
12~36 |
V |
| Kuasa yang dinilai |
24 (keadaan mantap) |
W |
|
| Ingatan |
Terpelihara |
|
|
| Penunjuk alam sekitar |
Suhu Operasi |
-40~ 60 |
℃ |
| Suhu penyimpanan |
-45~ 70 |
℃ |
|
| Getaran rawak |
3.03 ï¼20~2000Hzï¼ |
g |
|
| MTBF |
30000 |
h |
|
| Ciri antara muka |
|
PPS, EVENT, RS232, RS422, CAN (pilihan) |
|
|
|
Port rangkaian (terpelihara), port antena, port sensor kelajuan roda |
|
|
| Catatan: â Penjajaran adalah sah dan kunci hilang selama 60 minit; â¡Keadaan kenderaan, perlu digerakkan; â¢Penjajaran dua kedudukan, penjajaran 15min, perbezaan antara kedua-dua kedudukan adalah lebih besar daripada 90 darjah; ⣠Output tunggal 200Hz; â¤10s purata. |
|||
Teg Panas: Fiber Optic Gyroscope Fog Accelerometer dan Sistem Navigasi Gnss, Pengilang, Pembekal, Kilang, China, Buatan China, Disesuaikan, Kualiti Tinggi
Kategori Berkaitan
Hantar Pertanyaan
Sila berasa bebas untuk memberikan pertanyaan anda dalam borang di bawah. Kami akan membalas anda dalam masa 24 jam.
Produk Berkaitan